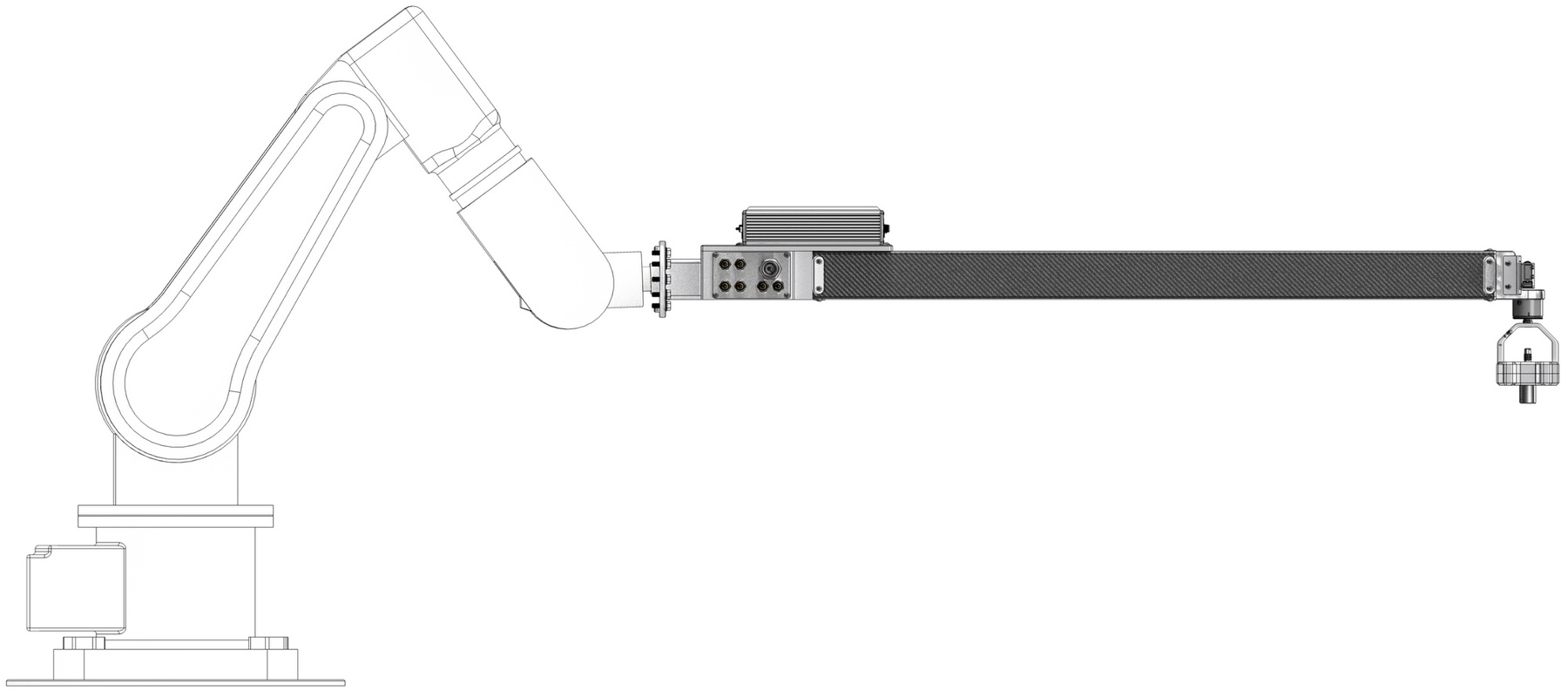
Extended-Reach Custom End Effector
This project was to design and build a custom, scratchbuilt end effector to mount a delicate, floating sensor. The client was seeking to perform automated, high-fidelity inspection of nonplanar composite surfaces, at a distance far beyond the reach of the robot’s arm. Our task was to achieve the needed reach for the sensor without a significant loss in stiffness, while adhering to specific criteria for allowable degrees of freedom of movement and rotation in the sensor itself. Total project time of design, manufacturing, documentation and delivery: 4 weeks.