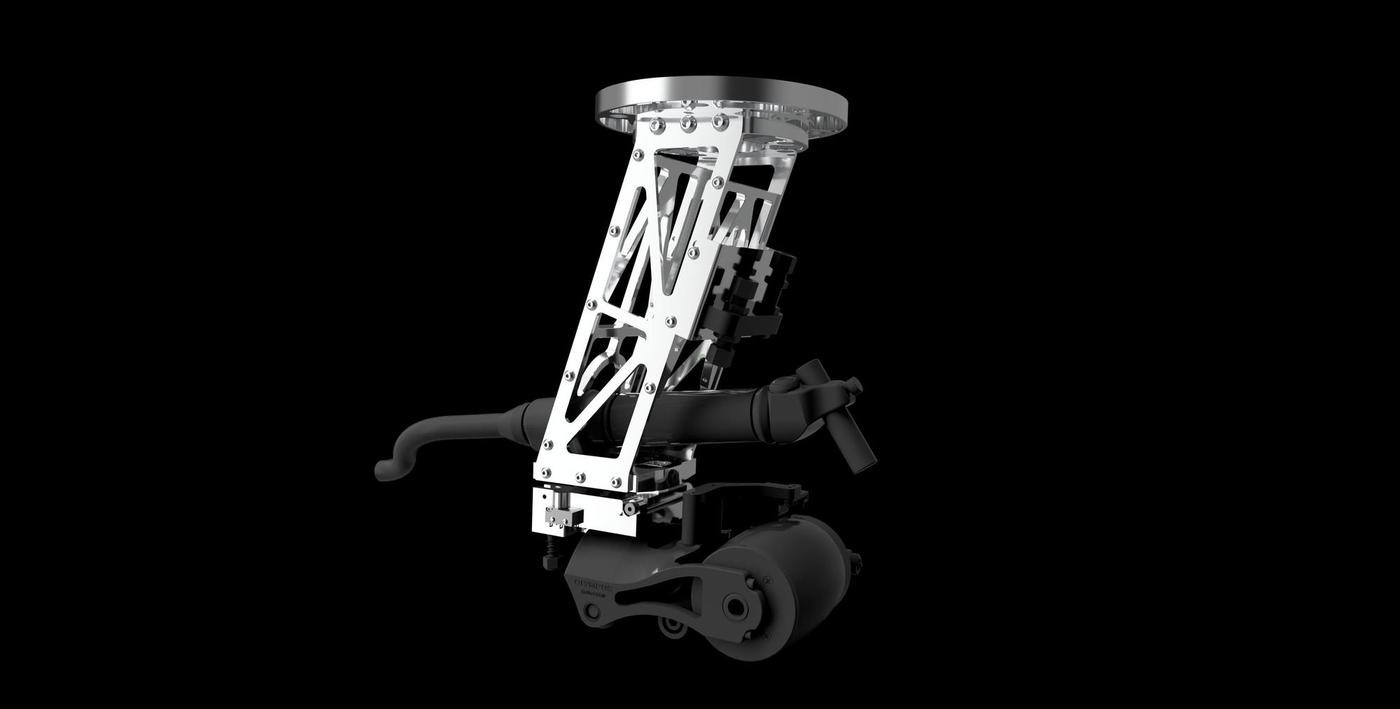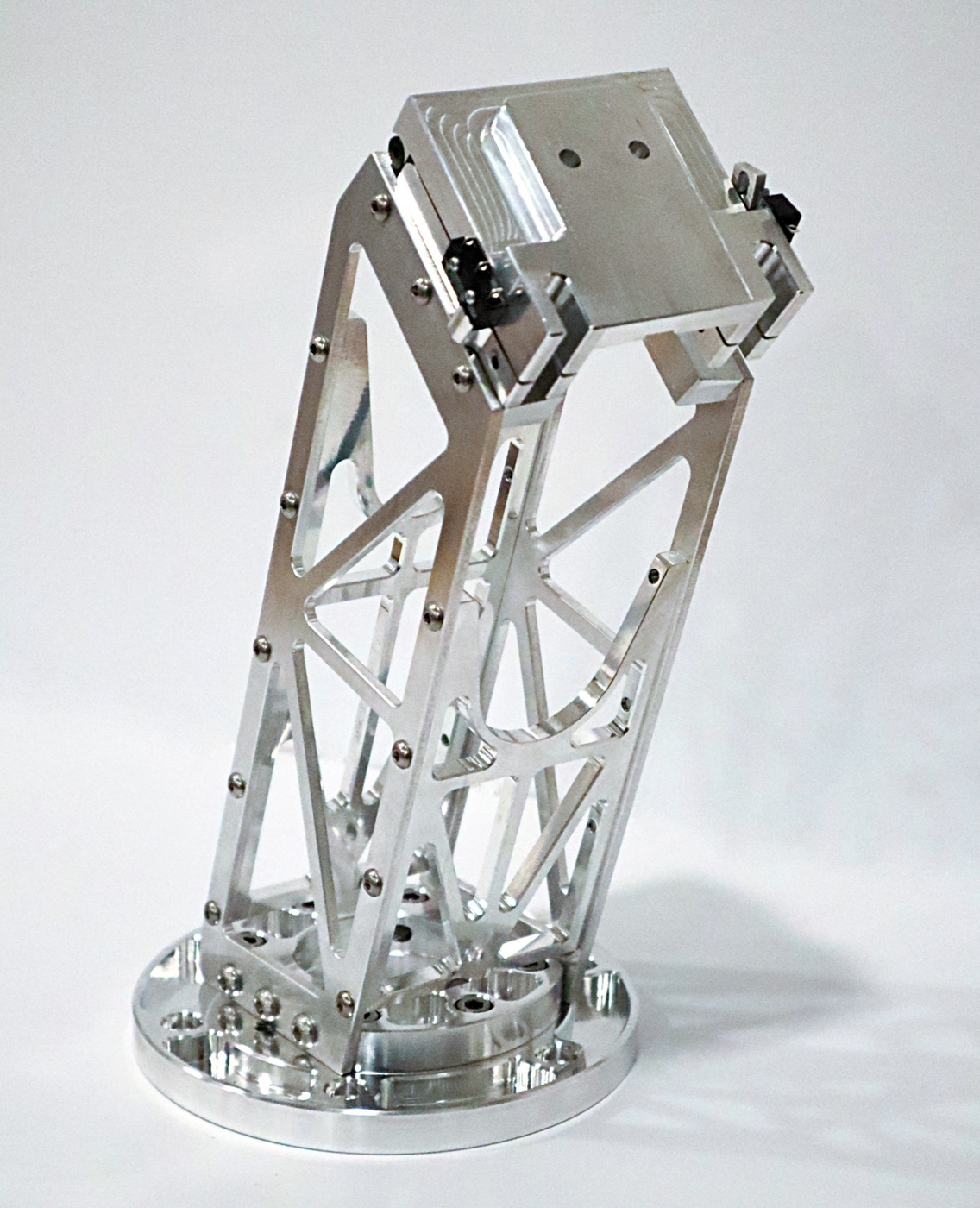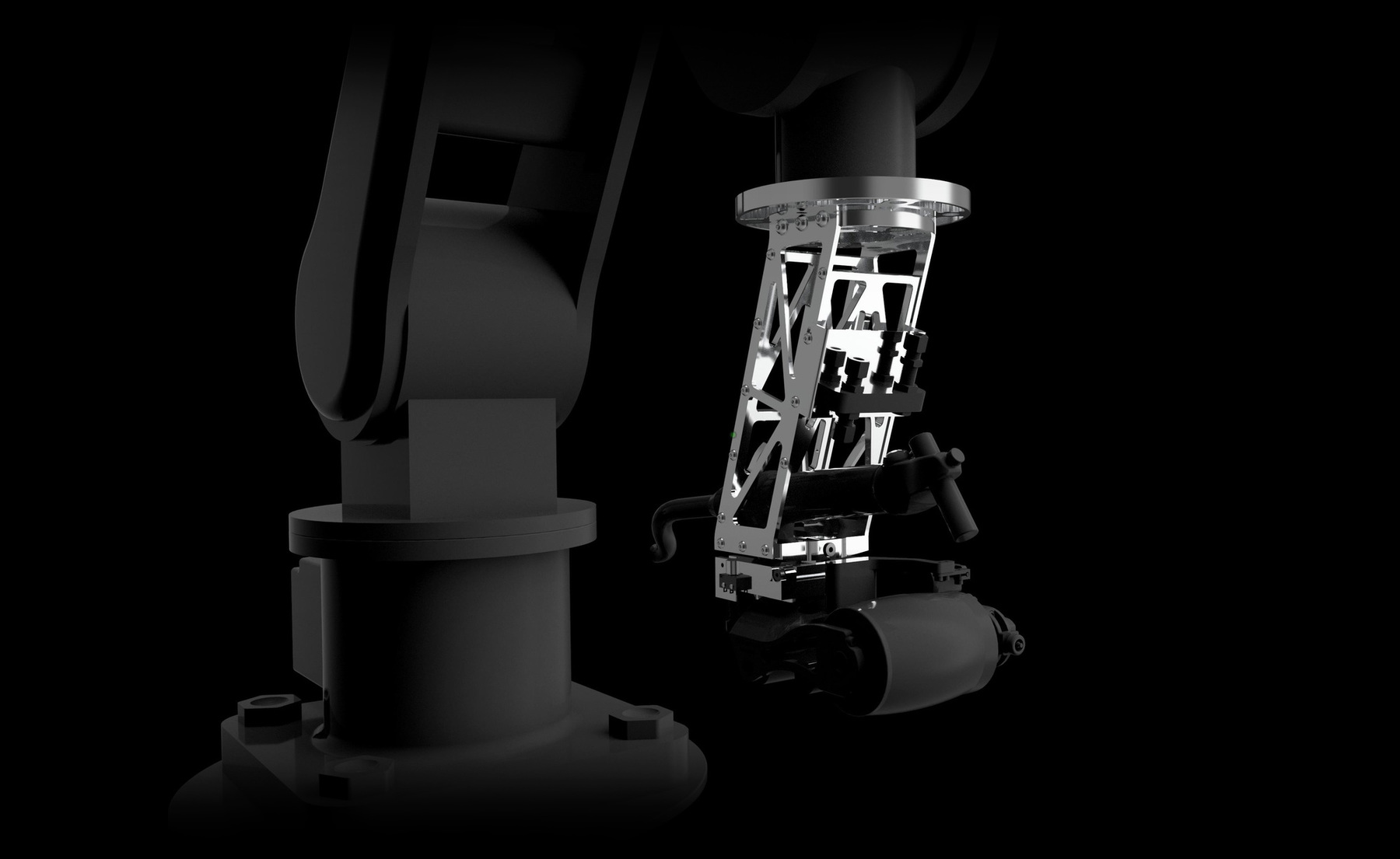
This project involved turning a hand-held ultrasound device into a robot arm end effector. However, it came with the added challenge of creating adjustable, spring-loaded motion limiters in multiple axes, to allow for some movement when contacting a surface.
Our final solution was delivered in under 3 weeks, and it eliminated the need for the client to spec and purchase a robot equipped with force sensing. Building adjustable degrees of movement into the end effector simplified the overall project by requiring a less sophisticated robot, resulting in time and cost savings for our client.